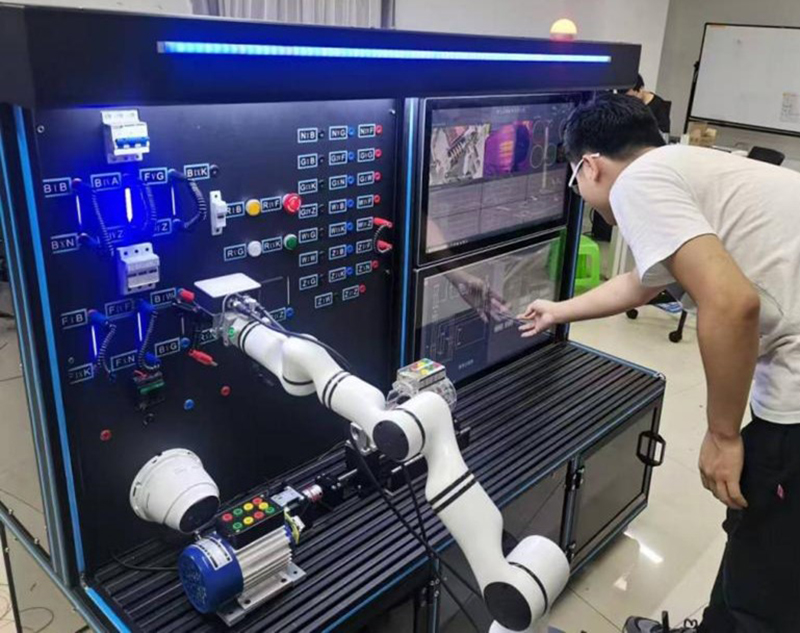
SBDQ-205A機器人視覺數智化電氣實訓平臺
一、實驗指導
(一)電氣實訓操作
機器人視覺數智化電氣實訓平臺學生了解電氣工程中常見的控制回路及插件,并進行邏輯觸發后完成整體電氣回路的搭建,過程中記錄,并對過程進行評估和識別。
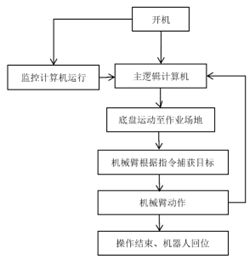
1.平臺啟動后進入登錄界面,輸入實訓者身份信息后,開始在主控界面進行線路的接通,并在執行過程中了解操作部件的結構、原理以及使用方式;
2.指令發出后實訓臺開始呼喚機械臂操作部分就位,并開始執行按壓、插拔、旋轉等動作:
3.所有操作完畢后,將對操作內容進行識別評估、同時啟動實訓對象,并開始監控其狀態,實訓對象運行過程中以物理的方式進行運行原理及內部結構的展示;

(二)自主行進機器人實訓
1.機器人底盤技術介紹:
學生了自行走機器人基本原理和應用場景。
介紹自行走機器人運行的基本條件及邏輯。
2.行走部分遙控操作:
學生使用遙控終端與機器底盤連接,操控機器人底盤,同時了解和學習差速控制條件下的底盤前進、轉彎、掉頭變速等運動學分析。
3.可視化終端展示及學習:
學生使用遠程終端學習和了解傳感器數據的原理、發布、完成基于gazebo界面工具搭建2D地圖,以及多算法模型規劃下的全局地圖和局部地圖。
4.編程控制實驗:
學習如何ROS命令切換地圖及路徑規劃算法,實現自行走機器人不同的路線規劃。
(三)機器視覺模塊實訓
學習和了解機器視覺模塊的基本原理和功能,以及其在機器人應用中的作用。
1、介紹機器視覺模塊的圖像采集、處理和識別技術,如顏色識別、形狀識別、文字等。
2.目標物體識別任務設計
設計目標物體識別任務,并植入相應的模型,根據視覺反饋識別特定顏色、形狀等特征的物體,并執行相應的動作,過程中要求學生考慮識別算法、目標檢測和定位精度等因素,設計合理的識別任務。
3.實驗操作
學生進行實驗操作,控制機器人根據視覺反饋執行不同的動作,如拾取特定顏色的物體。
學生根據實驗結果對視覺反饋控制程序進行調整和優化,提高識別和執行的準確性和效率。
(四)機械臂模塊實訓
學習和了解多軸機械臂的基本原理和功能,以及其在工業應用中的作用。
1、示教界面下的機械臂移動及終端的動作配合;
2、rvia可視化界面下機械臂運動軌跡規劃及避障操作。
3.實驗操作
學生根據目標坐標,通過路徑規劃器對機械臂進行單點移動、多點軌跡移動,并控制機器人終端拾取物品。
二、主要技術參數
產品型號 | YY-SC02409012 |
系統電源 | AC380/AC220 |
設備重量 | <300kg |
額定功率 | <4KW |
環境濕度 | ≤85% |
設備尺寸 | 1000*800*1400mm |
安全保護 | 急停按鈕,漏電保護,過流保護,接地保護 |
雷達 | 單線激光雷達 |
行走驅動 | 伺服電機 |
相機 | 雙目深度相機 |
觸摸屏 | 32寸電容觸摸屏 |
自行走功能 | 建圖、避障、路徑規劃 |
機械臂 | 6自由度旋轉、插拔、按壓 |
交互 | 過程感知、動態狀態顯示 |
三、設計軟件工具
內容 | 運行環境 | 語言 |
機器人底盤 | ubuntu20.4 | Ros1、Python3.8 |
機械臂運動控制 | ubuntu20.4 | Ros1、Python3.8 |
視覺識別 | ubuntu20.4 | Python3.8+yoloV5 |
操作主邏輯 | Win10 | Python3.8+Qt |
操作展示端邏輯 | Win10 | Python3.8+Qt |
過程感知 | Win10 | Python3.8+Qt |
四、設備結構與組成
電氣工程數智化實訓平臺平臺采用模塊化設計,分別為自行走機器人模塊、機械臂模塊、電氣控制模塊、機器視覺模塊、顯示操作模塊、等多功能快換模塊組成,實訓臺采用鋁型材結構,臺面上用于放置實訓對象。

(一)自行走機器人模塊
機器人底盤采用雙模控制方式(遙控+自主避障導航),根據實訓臺操作指令進行位置的移動,導航及行進。
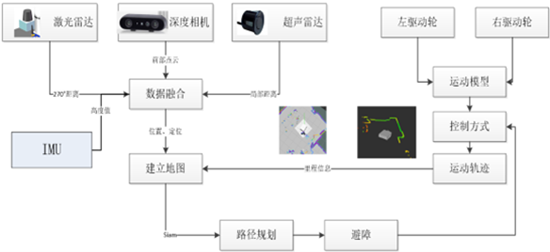
工作流程:
可視化Ros工作平臺,包含對相機、雷達、底盤驅動、短波雷達、IMU姿態傳感器等組成部件的調用,提供SDK,在完成實訓任務的同時,具備多種機器人行進算法和控制的輸出:
a)對機器人自主行進、建圖、避障話題及數據發布直觀的認知。
b)Rviz可視窗口下的導航狀態監控及目標設定。
c)遙控狀態下的差速模式行進轉彎、掉頭、修正交互感官。
d)NFS掛載與配置。
(二)機械臂動作模塊
由六自由度機械臂、機械爪、深度相機組成。機器人本體模仿人的手臂,共有6 個旋轉關節,每個關節表示一個自由度,深度相機負責視覺識別及測距、機械爪負責識別后動作執行。
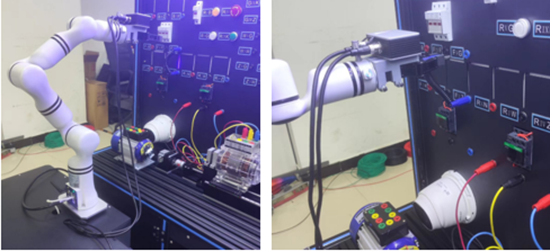
工作流程:
Rviz可視化界面,通過多自由度的運行配合,完成目標的捕捉,在完成實訓任務的同時,具備機器視覺及相關的訓練和過程演示:
a)手眼標定。
b)機械臂運動學正逆解。
c)AR標簽識別。
d)Moveit軌跡規劃及避障。
(三)顯示操作模塊
顯示操作模塊分別由主邏輯控制、過程感知部分組成,其中主邏輯計算機負責對整體任務指令的發出進行輸出,包括自行走底盤的運動、機械臂操作指令、主交互界面的操作指令識別等,監控計算機分別對實訓對象的轉速、溫度、噪聲、操作動作等動態參數進行感知和展示。
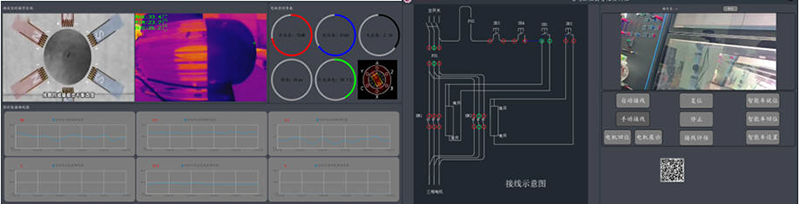
顯示部分采用聯動模式進行工作,及操作對象跟換后展示進行聯動,包括原理、組成結構等進行三維動畫展示;機械臂動作執行狀態進行實時顯示。
同時采用模塊化設計,在具備課件標定后替換功能,實訓過程在不單進行操作的交互還具備以下功能:
a)傳感技術的應用及常態感知技術展示。
b)基于多模塊交互狀態下的通訊及響應。
c)NFS服務端、客戶端工作模式。
(四)機器視覺模塊
機器視覺模塊由深度相機、yoloV5、opencv、Svw模型算法等組成,機械臂掃描過程中識別目標特征并獲取空間坐標,為機械臂軌跡規劃提供終點坐標。

Opencv可視化界面,通過深度相機的調用,在完成實訓任務的同時,具備機器視覺識別的相關算法模型調用:
a)Yolo識別過程及模型訓練。
b)基于Svw模型的文字提取。
c)圖像的讀取及抽幀處理。
d)TOF測距空間坐標提取。
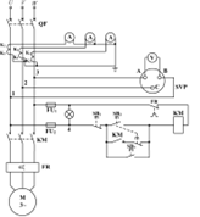
(五)電氣控制模塊
電氣控制模塊分為:斷路接通部分、按鈕開關、接通展示部分組成,在實訓過程中通過機械臂使斷路及控制部件接通,并進行展示,同時實訓對象進行感知。
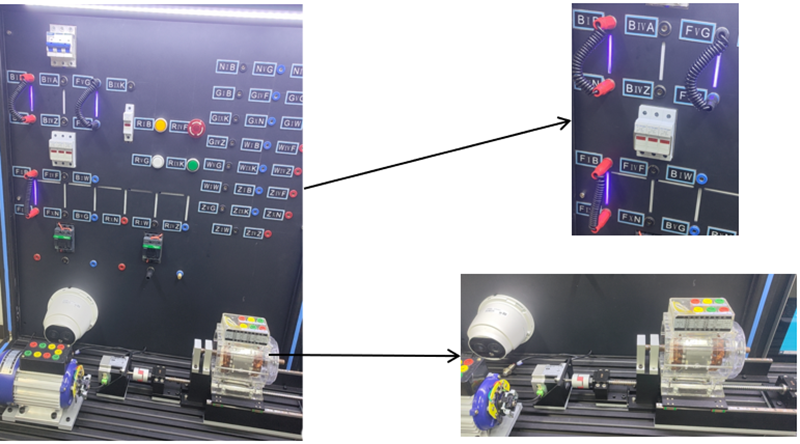
采用模塊插拔化設計可以快速完成部件的部署及線路更換,完成相應的更換后可以快速實現:
a)不同課件的替換。
b)實訓動部件的更換。
五、主設備配置清單
序號 | 名稱 | 主要部件、器件及規格 | 數量 |
1 | 自行走機器人模塊 | 1、減速箱形式:L型蝸桿減速器; 2、減速比:60:1; 3、電機最大轉速:3000轉/分鐘; 4、電機形式:直流私服電機; 5、電機數量:2; 6、電機扭矩:2.4NM; 7、搭載傳感器:激光雷達、短波雷達、姿態傳感器; 8、操作系統:ubuntu20.4-Ros1; 9、遠程可視化界面; 10、傳感器:激光雷達、短波雷達、IMU; 11、預裝開源:cartographer建圖、DWA路徑規劃、動態避障、自主導航; | 1套 |
2 | 機械臂動作模塊 | 1.工作范圍:≥800 mm; 2.有效負荷:≥5 kg; 3.自由度:≥6個; 4.重復定位精度:±0.02 mm; 5.防護等級:IP40; 6.軸運動 工作范圍 最大速度 軸1≥+170°~-170°(360°/S) 軸2≥+40°~-195°(360°/S) 軸3≥+150°~-115°(488°/S) 軸4≥+185°~-185°(600°/S) 軸5≥+120°~-120°(529°/S) 軸6≥+350°~-350°(800°/S) 7.機器人控制器 采用標準的工業控制計算機多核處理器;基于ubuntu操作系統平臺;能直接外接顯示器、鼠標、鍵盤和USB,方便程序的讀寫;內置大容量電池,斷電保護功能; 9.示教器 采用遠程終端共享界面直接進行控制;具備多項操作方向按鈕及姿態輸入界面,方便操作與安全。 | 1套 |
3 | 機器視覺模塊 | 1.主要由智能相機、相機支架、通訊電纜等組成,可對顏色、形狀、文字進行檢測識別,可獨立使用也可以與其他模塊配合使用; 2.雙目深度相機采用嵌入式硬件平臺,可進行高速的圖像處理,植入高精度定位與測量算法; 3.具備紅外測距功能; 4.分辨率:1920x1080像素分辨率; 5.傳感器:1/2.5”彩色傳感器,幀緩存:32M; 6.通訊接口:RJ45千兆以太網; | 1套 |
4 | 顯示操作模塊 | 1、32寸電容觸摸交互屏; 2、主動式響應感知界面; 3、聯動響應狀態下的主輔響應機制; 4、模塊化組態軟件,便于更換課件; | 1套 |
5 | 電氣控制模塊 | 主操作界面,包括按鈕指示燈、通斷開關、接線開關,輔助面板包含開關電源、工業交換機、485集線器、AI采集卡、線控繼電器等組成。系統配有兩套AI采集模塊用于實訓對象的啟動、停止、運行及接線狀態的識別,配置可編程控制器及擴展模塊,協調各工作端之間的運行。 | 1套 |